Our Research
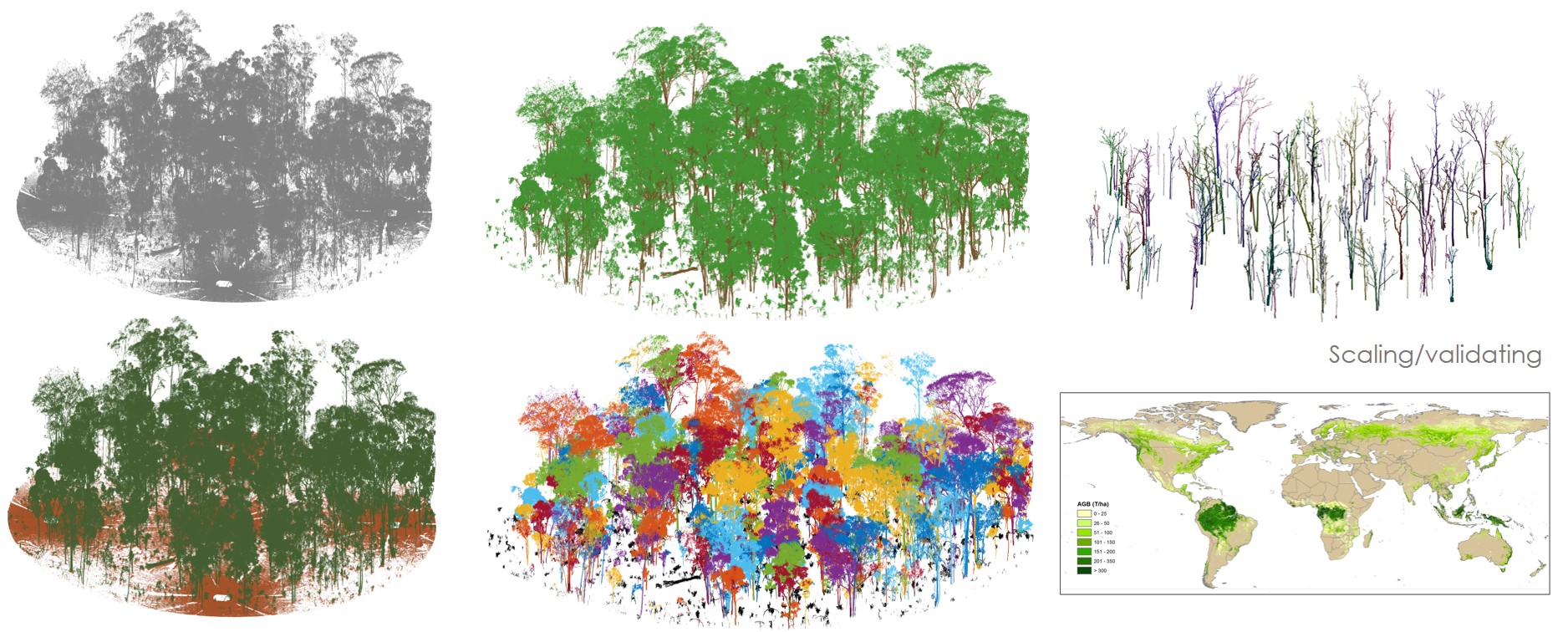
Our research mainly focuses on LiDAR remote sensing and point cloud intelligent processing, with a specific interest on fine-scale vegetation applications such as precision forestry and agriculture. We develope advanced and ready-to-use data algorithms for 3D scene understanding with the hope to ease the access of information content embedded in point cloud data. This concept involves tasks including point cloud semantic segmentation, instance segmentation, 3D reconstruction, etc.
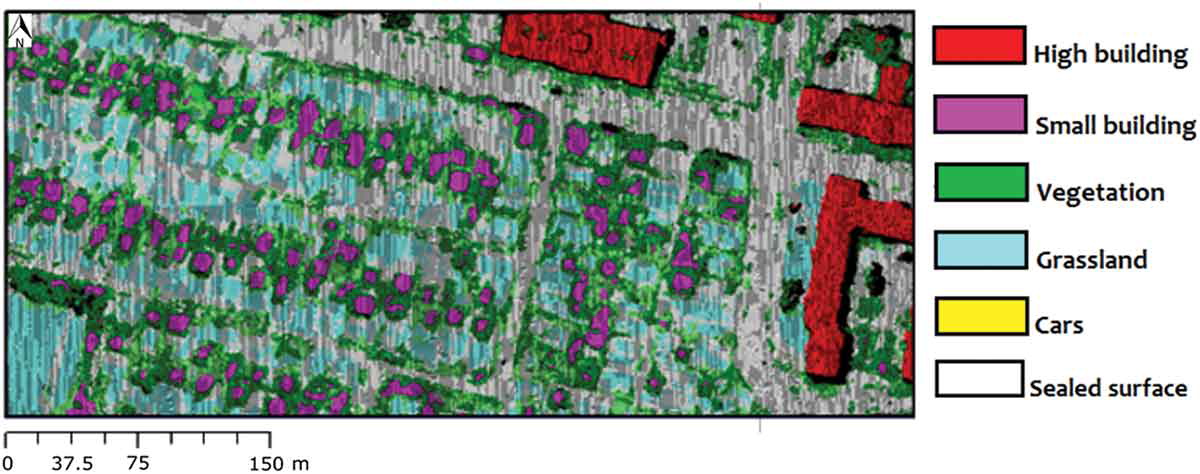
Our current interest is to use light-weight and portable LiDAR devices (e.g., UAV and backpack LiDAR systems) to characterize urban environments. We are equipped with modern LiDAR sensors such as the DJI L1 UAV LiDAR and the Libakcpack D50 mobile scanner.